
|
ProfessorKai Xu (徐凯) is a Professor at the Institute of AI for Industries (IAII), Chinese Academy of Sciences. Before joining IAII, he was a professor at National University of Defense Technology (NUDT). He used to be an Adjunct Professor of Simon Fraser University. He earned his Ph.D in computer science in 2011 from NUDT. From 2008 to 2010, He worked as a visiting PhD in the GrUVi Lab of Simon Fraser University, supervised by Richard (Hao) Zhang. During 2012-2014, he conducted postdoctoral research at the VCC@SIAT, working with Baoquan Chen. During 2017-2018, he visited the Vision and Robotics Group at Princeton University, working with Thomas Funkhouser and Szymon Rusinkiewicz. Here is Kai's CV. Kai is leading the PAI Lab @ IAII and co-leading the iGRAPE Lab @ NUDT, which conduct research in the areas of computer graphics, embodied intelligence and physical & spatial intelligence. The current directions of interest include world modeling, neural simulator and robotic manipulation & navigation, etc. For more details, please refer to our publications. |





Recent work
- [New] Aug 1, 2024: Our LLM-enhanced household rearrangement paper is conditionally accepted to SIGGRAPH Asia 2024. Please check out more recent papers here.
- Aug 5, 2023: Our generic shape bin packing paper is accepted by TOG and will be presented at SIGGRAPH 2024. Our MIPS-Fusion paper is conditionally accepted to SIGGRAPH Asia 2023. Three papers are accepted to ICCV 2023. Please check out details here.
- Feb 28, 2023: Five papers are accepted to CVPR 2023, two to ICRA 2023 and one to AAAI 2023 as an oral paper. Please check out details here.
- Aug 29, 2022: One paper on single-view symmetry detection is accepted to TPAMI and one about fast-camera-motion realtime RGB-D reconstruction is accepted to TRO. Please check out details here.
- April 10, 2022: Five papers are accepted to CVPR 2022, one paper on DRL-based online bin packing accepted to ICLR 2022, and one paper on modeling grasping by Interaction Bisector Surface (IBS) accepted to SIGGRAPH 2022. Please check out details here.
- May 10, 2021: Our paper on fast-camera-motion RGBD reconstruction is accepted to SIGGRAPH 2021. Please check out details here.
- Feb. 24, 2021: Two papers accepted to CVPR 2021. Please check out details here.
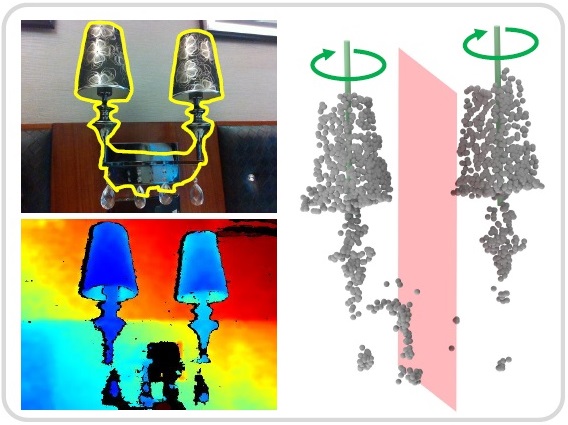
- Aug. 2, 2020: Our paper on end-to-end learnable symmetry prediction from single-view RGB-D images is accepted to SIGGRAPH Asia 2020. Please check out details here.
- Jun. 15, 2020: Our paper on differentiable grasp planner is accepted to RSS 2020. Please check out details here.
- Feb. 24, 2020: Five papers accepted to CVPR 2020. Please check out details here.
- Dec. 20, 2019: We are pleased to annonce the release of the PartNet-Symh dataset (used by our CVPR 2019 paper PartNet). This dataset augments the PartNet dataset by adding a hierarchical organization of fine-grained parts for each shape. In general, PartNet-Symh can be used to train any model for encoding/decoding part-based structures based on Recursive Neural Networks, e.g., GRASS.
- June. 18, 2019: I am glad to annonce the release of the source codes and benchmarks of our CVPR 2019 papers: Shape2Motion (code, data); PartNet (code and data) and HierContext (code). Thanks go to the students and collaborators. Shape2Motion and HierContext are also invited to be presented at the 3D Scene Generation Workshop at CVPR 2019.
- May. 6, 2019: Daniel Ritchie, Sid Chaudhuri, Richard Zhang and I organized a tutorial at Eurographics 2019. Please check out details here.
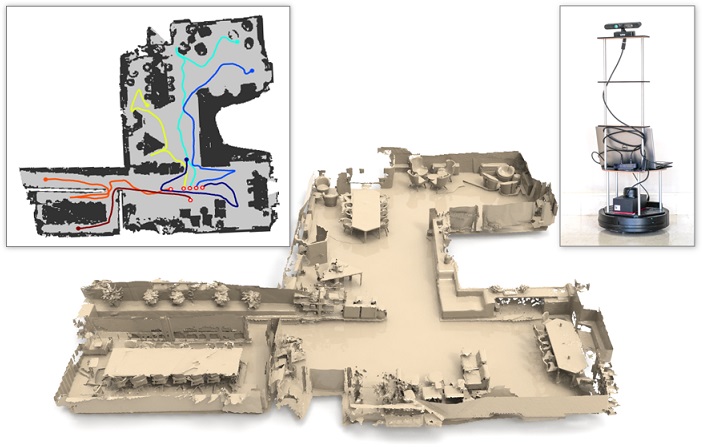
- Mar. 24, 2019: Our multi-robot scene reconstruction paper is conditionally accepted to SIGGRAPH 2019. Please check out details here.
- Mar. 2, 2019: Three papers are accepted to CVPR 2019, including one oral (Shape2Motion) and two posters (HierContext and PartNet).
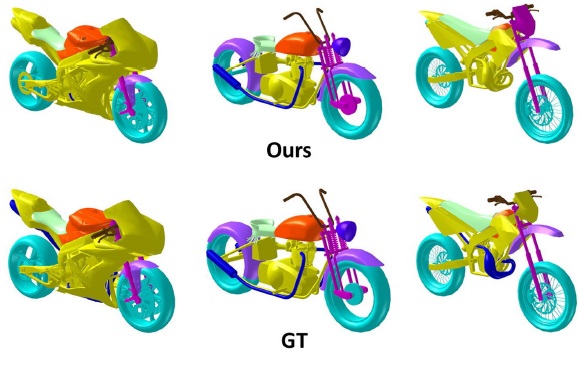
- Oct. 17, 2018: Our two SIGGRAPH Asia 2018 papers, deep recursive 3D shape composition and fine-grainded component labeling for 3D shapes, have released the full source codes along with datasets.
- Jun. 10, 2018: Our PlaneMatch paper is accepted as an oral paper to ECCV 2018. The paper is about 3D reconstruction of RGB-D sequences through learning a deep model for co-planarity-based matching. The source code is available here.
- Jun. 10, 2018: Our GRASS paper is selected as a poster at the Bridges to 3D Workshop at CVPR 2018. See the poster.
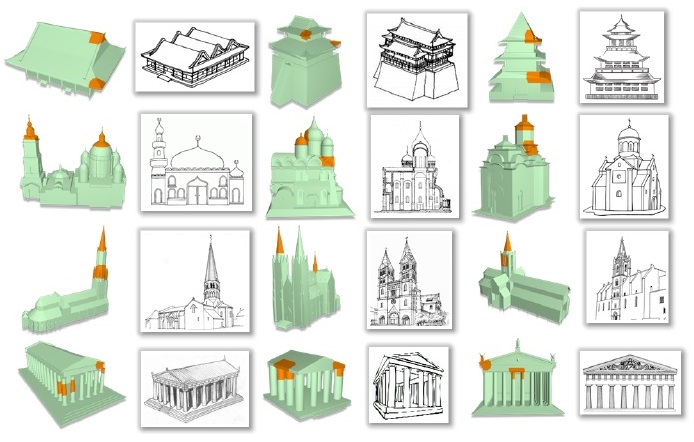
- Mar. 27, 2018: Our TOG paper, "Semi-Supervised Co-Analysis of 3D Shape Styles from Projected Lines", is awarded the Graphics Replicability Stamp! We have built a website of online 3D shape style analysis. You are welcomed to test our method by uploading your own 3D models.
- Mar. 26, 2018: Three papers are to be presented at SIGGRAPH 2018. Other newly accepted papers include one CVPR 2018 paper, one ICRA 2018 paper and one AAAI 2018 paper. Please check out details here.
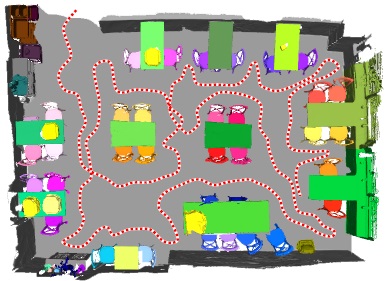
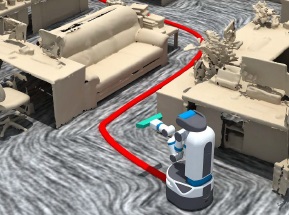
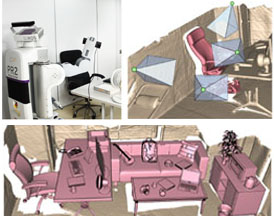
- Aug. 3, 2017: Our paper "Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields" is accepted to SIGGRAPH Asia 2017. Please see more details here. The source code of this work has been released as a package on ROS.
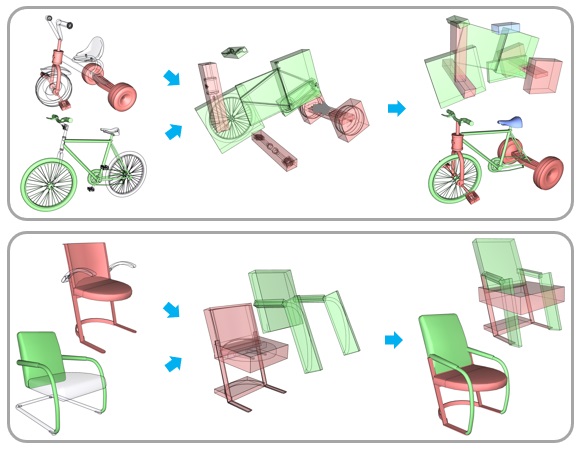
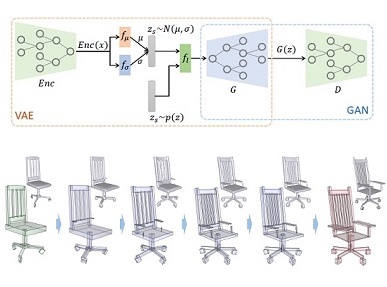
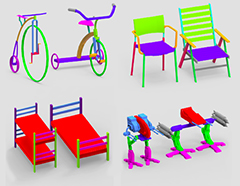
- Apr. 1, 2017: Our GRASS (Generative Recursive Autoencoders for Shape Structures) paper has been selected as one of six SIGGRAPH 2017 papers featured for press release including EurekAlert, TechXplore and XinhuaNet, etc.
- Jun. 20, 2017: The source code of our SIGGRAPH 2017 paper "GRASS: Generative Recursive Autoencoders for Shape Structures" is now available via github. UPDATE: A PyTorch implementation (currently with only the VAE part) is available (thanks to Chenyang Zhu's original implementation).
- Apr. 23, 2017: Two papers are accepted to SIGGRAPH 2017. One is about learning generative models of 3D shape structures and the other is about structure-aware shape correspondence. Check out details here.
- Oct. 20, 2016: The source code of 3D Recurrent Attention Model for Object Identification proposed in our SIGGRAPH Asia 2016 paper is made available via github. Please also check out a follow-up work on this topic here.
- Aug. 18, 2016: Our course, "Data-Driven Shape Analysis and Processing", is accepted to SIGGRAPH Asia 2016. This course will be given together with Vladimir Kim, Qixing Huang, Evangelos Kalogerakis and Niloy Mitra.
- Aug. 10, 2016: Our paper, "3D Attention-Driven Depth Acquisition for Object Identification", is conditionally accepted to SIGGRAPH Asia 2016, to be held in Macao this December. Check more details here.
- Jun. 16, 2016: Two papers,"Mobility Fitting using 4D RANSAC" and "CustomCut: On-demand Extraction of Customized 3D Parts with 2D Sketches", are accepted by SGP 2016. See details here.
- Oct. 30, 2015: Our survey paper, "Data-Driven Shape Analysis and Processing", has been accepted by Computer Graphics Forum. See more details here.
- Oct. 30, 2015: The source code of object analysis (object-level segmentation and entropy-based NBP selection) of our robot-operated scene scanning paper is available for downloading.
- Aug. 12, 2015: Two papers, "Autoscanning for Coupled Scene Reconstruction and Proactive Object Analysis" and "Deformation-Driven Topology-Varying 3D Shape Correspondence", are conditionally accepted to SIGGRAPH Asia 2015. Please see more details here.
- Aug. 9, 2015: Our paper on Projective Feature Learning for 3D Shapes is accepted to Pacific Graphics 2015. Source code is available for downloading.
- Aug. 7, 2015: The source code of mesh segmetation based on Extreme Learning Machine of our SGP 2014 paper is now available. The training time of our method is 100x faster than the state-of-the-art methods.
- Feb. 25, 2015: Our survey paper "Data-Driven Shape Analysis and Processing" is now online via arXiv.org: arXiv:1502.06686. The wikipage is available online.
- Jan. 5, 2015: One paper on Skeleton-Intrinsic Symmetrization is conditionally accepted to Eurographics 2015.
- May. 17, 2014: The source code of focal analysis of our SIGGRAPH 2014 paper is available.
- Mar. 28,
2014: Two papers, "Organizing Heterogeneous Scene Collections through Contextual Focal Points" and "Topology-Varying 3D Shape Creation via Structural Blending", are
conditionally accepted to SIGGRAPH 2014. See more details here.
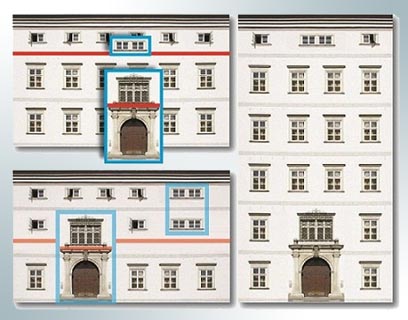
- Jun. 27, 2013: The source code and data of our facade structure analysis paper is now available.
- Jun. 14,
2013: Our
paper on outdoor scene consolidation is accepted to SGP 2013. Another paper
on sketch-based 3D object design is accepted to CGF (with minor
revision).
- Apr. 22,
2013: The
project pages of our SIGGRAPH 2013 papers are available; see symmetry maximization and conshier.
- Apr. 6,
2013: Two
papers are
conditionally accepted to SIGGRAPH 2013: 1) Layered Analysis of Irregular
Facades via Symmetry
Maximization; 2) Co-Hierarchical Analysis of Shape Structures. Please
see more details here.
- Sep. 9,
2012: The datasets in our set
evolution
paper are available for downloading.
- Aug. 23,
2012: Our
paper
"Multi-Scale Partial Intrinsic Symmetry Detection" is
conditionally accepted to SIGGRAPH
Asia 2012.
- Jun. 8,
2012: Project page of our SIGGRAPH 2012 paper
is on.
- Apr. 3,
2012: Our
paper
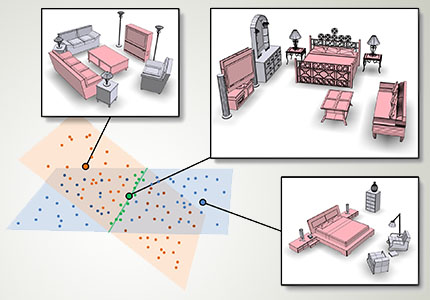
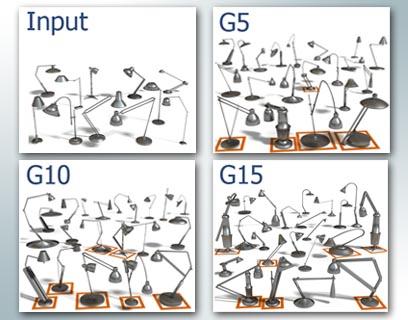
"Fit and Diverse: Set Evolution for Inspiring 3D Shape Galleries" is
conditionally accepted to SIGGRAPH
2012.
- Apr. 30,
2011: Project page of our SIGGRAPH 2011
paper is now on.
- Mar. 31,
2011: Our paper
"Photo-Inspired Model- Driven 3D Object Modeling" is conditionally
accepted to SIGGRAPH
2011.
- Jan. 31, 2011: The project page of symmetry hierarchy is now available from Eric's website.
- Dec. 1, 2010: Our paper "Symmetry Hierarchy of Man-Made Objects" is conditionally accepted to Eurographics 2011.
- Aug. 28, 2010: Project page for "Style-Content Separation by Anisotropic Part Scales" is on.
- Aug. 6, 2010: Our paper on Style-Content Separation is conditionally accepted to SIGGRAPH Asia 2010.
- Oct.
23, 2009: The source code of curve
orientation in our
feature-aligned texturing paper is now available.
Recent activities
- [New] I am appointed as an Associated Editor of IEEE Transactions on Visualization and Computer Graphics. I am also serving as a COI Coordinator of SIGGRAPH 2024 and SIGGRAPH Asia 2024, as well as a Program Committee Member of Eurographics 2024, SGP 2024, PG 2024, among others.
- I will be serving as a Program Co-Chair of GMP 2023. I am also serving on the Program Committee of SGP 2023, SMI 2023, PG 2023, among others.
- I am serving on the Program Committee of SIGGRAPH Asia 2022, SGP 2022, among others.
- I am appointed as an Adjunct Professor of Simon Fraser University. Thank you, SFU!
- I am serving on the Program Committee of Eurographics 2021, SGP 2021, PG 2021, among others.
- I am serving on the Program Committee of SIGGRAPH 2020, Eurographics 2020, SGP 2020, among others.
- I am serving on the Program Committee of SIGGRAPH 2019, SGP 2019, PG 2019, SMI 2019, CGI 2019, CVM 2019, and EG 3DOR 2019, and the COI coordinator for SIGGRAPH Asia 2019.
- I will be serving on the Program Committee of SIGGRAPH Asia 2018. I am also serving on the PC of PG 2018, SMI 2018, CGI 2018, CVM 2018, EG 3DOR 2018, ISVC 2018 and Chinagraph 2018, and as the Area Co-Chair of ISVC 2018.
- July. 1, 2017: I am visiting Princeton Univsersity, working with Prof. Thomas Funkhouser and Prof. Szymon Rusinkiewicz.
- I will be serving on the Program Committee of SIGGRAPH Asia 2017.
- I am nominated to serve as a co-chair of the Program Committee of CAD/Graphics 2017 and ICVRV 2017. I also serve on the PC of SGP 2017, PG 2017, CVM 2017 and EG 3DOR 2017.
- Dec. 8, 2016: Our course on Data-Driven Shape Analysis and Processing has been given at SIGGRAPH Asia 2016. Slides will soon be available from our course wikipage.
- I am honored to receive the Young Researcher Award of CSIAM Geometric Design and Computing at GDC 2016.
- I am now serving on the editorial board of Computer Graphics Forum.
- I am serving as the co-chair of the program committee of CSIAM Geometric Design and Computing of China (GDC) 2016, a geometry conference organized by CSIAM Technical Committee on GDC, to be held in Hefei, China. See the CFP.
- I am now serving on the editorial board of The Visual Computer, an Springer jounal.
- Nov. 2-5, 2015: Attend SIGGRAPH Asia 2015 in Kobe, Japan and present our paper on robot scene scanning with object analysis.
- Oct. 7-9, 2015: Attend Pacific Graphics 2015 held by Tsinghua University in Beijing and present our paper on "Projective Feature Learning for 3D Shapes".
- Aug. 27, 2015: Attend CAD/Graphics 2015 held in Xi'an and organize the panel discussion on "High-level Shape Understanding" with Jin Huang and Dong-Ming Yan.
- Jul. 14-29, 2015: Attend the summer schools of Zhejiang University, Shandong University and University of Science and Technology of China, and give talks on "robot-operated scene reconstruction and analysis" and "data-driven shape processing".
- Dec. 4, 2014: Our course on Data-Driven Visual Computing has been successfully held at SIGGRAPH Asia 2014. Slides are available from our course website.
- Dec. 3-6, 2014: Attend SIGGRAPH Asia 2014 in Shenzhen.
- I am organizing an invited course at SIGGRAPH Asia 2014, to be held in Shenzhen, Dec. 3-6, 2014. Welcome to our course! Please find detailed information here.
- I am serving on the Program Committee of SGP 2015.
- I am now serving on the editorial board of Computers and Graphics, an Elsevier jounal.
- Aug. 10-14, 2014: Attend SIGGRAPH 2014 in Vancouver, Canada.
- Apr. 7-11, 2014: Attend Eurographics 2014 in Strasbourg, France.
- A one-day workshop on "Creative Shape Modeling and Design" will be held in conjunction with SIGGRAPH Asia 2014, Shenzhen. I will be serving on the PC. Welcome to submit your work!
- I am serving on the International Program Committee of Eurographics 2014 (Short Papers), SGP 2014, Pacific Graphics 2014, GMP 2014, and Chinagraph 2014.
- Jul. 21-25,
2013: Attend SIGGRAPH 2013 in Anaheim, CA, USA.
- I am serving as International Program Committee (IPC) member for SIGGRAPH Asia 2013 (Technical Briefs & Posters), SGP 2013, PG 2013,
and CAD/Graphics 2013.
- Nov. 27 - Dec.
2, 2012: Attend SIGGRAPH
Asia 2012 at Singapore.
- Sep. 11, 2012:
Attend Workshop on City Modeling and Visualization held
by VCC.SIAT in
Shenzhen, and give a talk on multiscale partial intrinsic symmetry
detection.
- Aug. 5-9, 2012:
Attend SIGGRAPH
2012 in Los Angeles.
- Jul. 3-4, 2012:
I am giving two courses at the USTC Summer School 2012
on "Advances in Computer Graphics". One is on symmetry analysis and the
other is about data-driven shape synthesis. See more details in my research page.
- Jun. 11, 2011: Visit Prof. Ligang Liu's group at Zhejiang University and give a talk on Semantics Driven 3D Object Modeling.
- May 21, 2011: Visit the Visual Computing Center at SIAT and give a talk on Semantics Driven Shape Analysis and Modeling.
- Dec. 15, 2010: Attend SIGGRAPH Aisa 2010 at Seoul, Korea.
- Oct. 12, 2010: I've finished my two-year-stay at GrUVi lab, SFU and returned to China to complete my PhD study. Thank you, GrUVi!
- Mar. 8, 2010: Return to Vancouver, Canada to continue my visiting research.
- Mar. 1, 2010: Visit Prof. Baoquan Chen's group, 3D Digital City Research Center, at Shenzhen Institute of Advanced Tech (SIAT), China and give a talk on PIRS.
- Dec. 15, 2009: Attend SIGGRAPH Asia 2009 at Yokohama, Japan.